Numerical analytic continuation#
One of the main problems one faces when working with imaginary (Euclidean) time is inferring the real-time spectra \(\rho(\omega)\) from imaginary-time data \(G(\tau)\), in other words, we are seeking the inverse of the following Fredholm equation:
where again \(S_l\) are the singular values and \(U_l(\tau)\) and \(V_l(\omega)\) are the left and right singular (IR basis) functions, the result of a singular value expansion of the kernel \(K\).
Using the IR basis expansion, we can “invert” above equation to arrive at:
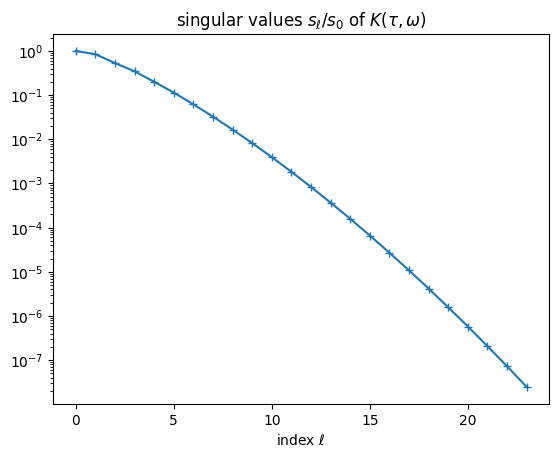
where \(K^{-1}\) denotes the pseudoinverse of \(K\). (We will defer questions about the exact nature of this inverse.) The numerical analytical continuation problem is now evident: The kernel is regular, i.e., all the singular values \(S_l > 0\), so the above equation can be evaluated analytically. However, \(S_l\) drop exponentially quickly, so any finite error, even simply the finite precision of \(G(\tau)\) in a computer, will be arbitrarily amplified once \(l\) becomes large enough. We say the numerical analytical continuation problem is ill-posed.
import numpy as np
import matplotlib.pyplot as pl
import sparse_ir
beta = 40.0
wmax = 2.0
basis = sparse_ir.FiniteTempBasis('F', beta, wmax, eps=2e-8)
pl.semilogy(basis.s / basis.s[0], '-+')
pl.title(r'singular values $s_\ell/s_0$ of $K(\tau, \omega)$')
pl.xlabel(r'index $\ell$');
Least squares form#
In order to make meaningful progress, let us reformulate the analytic continutation as a least squares problem:
To simplify and speed up this equation, we want to use the IR basis form of the kernel. For this, remember that for any imaginary-time propagator:
where the error term \(\epsilon_L\) drops as \(S_L/S_0\). We can now choose the basis cutoff \(L\) large enough such that the error term is consistent with the intrinsic accuracy of the \(G(\tau)\), e.g., machine precision. (If there is a covariance matrix, generalized least squares should be used.) Since the IR basis functions \(U_l\) form an isometry, we also have that:
allowing us to truncate our analytic continuation problem to (cf. Jarrell and Gubernatis, 1996):
This already is an improvement over many analytical continuation algorithms, as it maximally compresses the observed imaginary-time data \(g_l\) without relying on any a priori discretizations of the kernel.
def semicirc_dos(w):
return 2/np.pi * np.sqrt((np.abs(w) < wmax) * (1 - np.square(w/wmax)))
def insulator_dos(w):
return semicirc_dos(8*w/wmax - 4) + semicirc_dos(8*w/wmax + 4)
# For testing, compute exact coefficients g_l for two models
rho1_l = basis.v.overlap(semicirc_dos)
rho2_l = basis.v.overlap(insulator_dos)
g1_l = -basis.s * rho1_l
g2_l = -basis.s * rho2_l
# Put some numerical noise on both of them (30% of basis accuracy)
rng = np.random.RandomState(4711)
noise = 0.3 * basis.s[-1] / basis.s[0]
g1_l_noisy = g1_l + rng.normal(0, noise, basis.size) * np.linalg.norm(g1_l)
g2_l_noisy = g2_l + rng.normal(0, noise, basis.size) * np.linalg.norm(g2_l)
Truncated-SVD regularization#
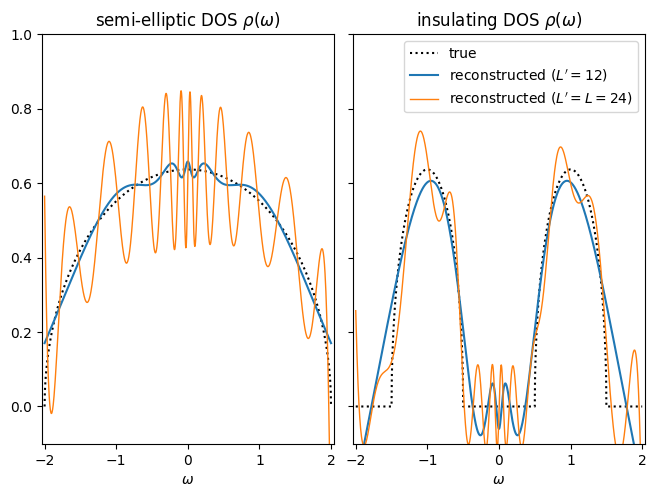
However, the problem is still ill-posed. As a first attempt to cure it, let us turn to truncated-SVD regularization (Hansen, 1987), by demanding that the spectral function \(\rho(\omega)\) is representable by the right singular functions:
where \(L' \le L\). The analytic continuation problem (1) then takes the following form:
The choice of \(L'\) is now governed by a bias–variance tradeoff: as we increase \(L'\), more and more features of the spectral function emerge by virtue of \(\rho_l\), but at the same time \(1/S_l\) amplifies the stastical errors more strongly.
# Analytic continuation made (perhaps too) easy
rho1_l_noisy = g1_l_noisy / -basis.s
rho2_l_noisy = g2_l_noisy / -basis.s
w_plot = np.linspace(-wmax, wmax, 1001)
Vmat = basis.v(w_plot).T
Lprime1 = basis.size // 2
def _plot_one(subplot, dos, rho_l, name):
pl.subplot(subplot)
pl.plot(w_plot, dos(w_plot), ":k", label="true")
pl.plot(w_plot, Vmat[:, :Lprime1] @ rho_l[:Lprime1],
label=f"reconstructed ($L' = {Lprime1}$)")
pl.plot(w_plot, Vmat @ rho_l, lw=1,
label=f"reconstructed ($L' = L = {basis.size}$)")
pl.xlabel(r"$\omega$")
pl.title(name)
pl.xlim(-1.02 * wmax, 1.02 * wmax)
pl.ylim(-.1, 1)
_plot_one(121, semicirc_dos, rho1_l_noisy, r"semi-elliptic DOS $\rho(\omega)$")
_plot_one(122, insulator_dos, rho2_l_noisy, r"insulating DOS $\rho(\omega)$")
pl.legend()
pl.gca().set_yticklabels([])
pl.tight_layout(pad=.1, w_pad=.1, h_pad=.1)
Regularization#
Above spectra are, in a sense, the best reconstructions we can achieve without including any more a priori information about \(\rho(\omega)\). However, it turns out we often know (or can guess at) quite a lot of properties of the spectrum:
the spectrum must be non-negative, \(\rho(\omega) \ge 0\), for one orbital, and positive semi-definite, \(\rho(\omega) \succeq 0\), in general,
the spectrum must be a density: \(\int d\omega\ \rho(\omega) = 1\),
one may assume that the spectrum may be “sensible”, i.e., not deviate too much from a default model \(\rho_0(\omega)\) (MAXENT) or not be too complex in structure (SpM/SOM).
These constraints are often encoded into the least squares problem (1) by restricting the space of valid solutions \(\mathcal R\) and by including a regularization term \(f_\mathrm{reg}[\rho]\):
All of these constraints act as regularizers.
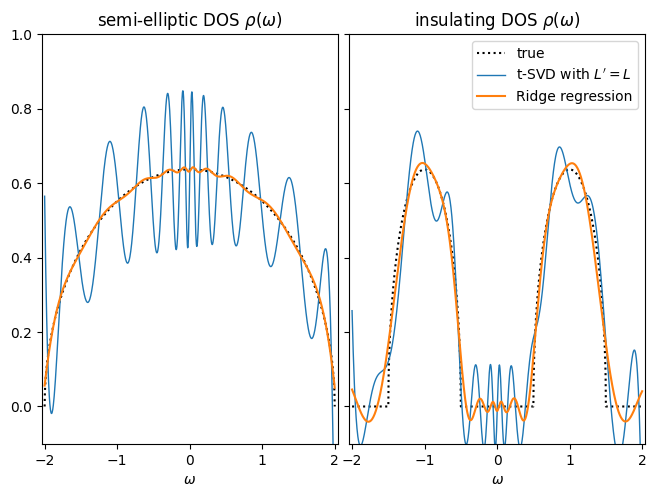
As a simple example, let us consider Ridge regression in the above problem. We again expand the spectral function in the right singular functions with \(L'=L\), but include a regularization term:
where \(\alpha\) is a hyperparameter (ideally tuned to the noise level). This term prevents \(\rho_l\) becoming too large due to noise amplification. The regularized least squares problem (2) then amounts to:
# Analytic continuation made (perhaps too) easy
alpha = 100 * noise
invsl_reg = -basis.s / (np.square(basis.s) + np.square(alpha))
rho1_l_reg = invsl_reg * g1_l_noisy
rho2_l_reg = invsl_reg * g2_l_noisy
def _plot_one(subplot, dos, rho_l, rho_l_reg, name):
pl.subplot(subplot)
pl.plot(w_plot, dos(w_plot), ":k", label="true")
pl.plot(w_plot, Vmat @ rho_l, lw=1, label=f"t-SVD with $L'=L$")
pl.plot(w_plot, Vmat @ rho_l_reg, label=f"Ridge regression")
pl.xlabel(r"$\omega$")
pl.title(name)
pl.xlim(-1.02 * wmax, 1.02 * wmax)
pl.ylim(-.1, 1)
_plot_one(121, semicirc_dos, rho1_l_noisy, rho1_l_reg, r"semi-elliptic DOS $\rho(\omega)$")
_plot_one(122, insulator_dos, rho2_l_noisy, rho2_l_reg, r"insulating DOS $\rho(\omega)$")
pl.legend()
pl.gca().set_yticklabels([])
pl.tight_layout(pad=.1, w_pad=.1, h_pad=.1)
Real-axis basis#
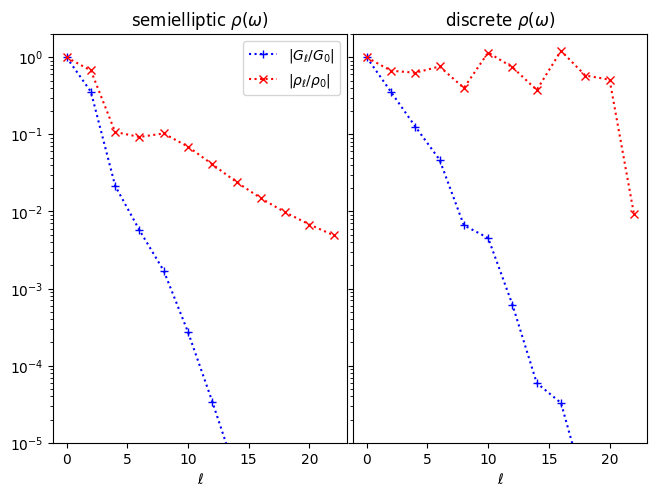
One problem we are facing when solving the regularized least squares problem (2) is that the regularization might “force” values of \(g_l\) well below the threshold \(L\). (For example, in general infinitely many \(g_l\) need to conspire to ensure that the spectral function is non-negative.) This is a problem because, unlike \(g_l\), which decay quickly by virtue of \(S_l\), the expansion coefficients \(\rho_l\) are not compact (see also Rothkopf, 2013):
Let us illustrate the decay of \(\rho_l\) for two densities of states:
semielliptic (left), where the \(\rho_l\) decay roughly as \(1/l\), and are thus not compact.
discrete set of peaks: \(\rho(\omega) \propto \sum_i \delta(\omega - \epsilon_i)\) (right), where \(\rho_l\) does not decay at all, signalling the fact that a delta-peak cannot be represented by any finite (or even infinite) expansion in the basis.
dos3 = np.array([-0.6, -0.1, 0.1, 0.6]) * wmax
rho3_l = basis.v(dos3).sum(1)
g3_l = -basis.s * rho3_l
def _plot_one(subplot, g_l, rho_l, title):
pl.subplot(subplot)
n = np.arange(0, g_l.size, 2)
pl.semilogy(n, np.abs(g_l[::2]/g_l[0]), ':+b', label=r'$|G_\ell/G_0|$')
pl.semilogy(n, np.abs(rho_l[::2]/rho_l[0]), ':xr', label=r'$|\rho_\ell/\rho_0|$')
pl.title(title)
pl.xlabel('$\ell$')
pl.ylim(1e-5, 2)
_plot_one(121, g1_l, rho1_l, r'semielliptic $\rho(\omega)$')
pl.legend()
_plot_one(122, g3_l, rho3_l, r'discrete $\rho(\omega)$')
pl.gca().set_yticklabels([])
pl.tight_layout(pad=.1, w_pad=.1, h_pad=.1)
Thus, we need another representation for the real-frequency axis. The simplest one is to choose a grid \(\{\omega_1,\ldots,\omega_M\}\) of frequencies and a function \(f(x)\) and expand:
where \(a_i\) are now the expansion coefficients. (More advanced methods also optimize over \(\omega_m\) and/or add some shape parameter of \(f\) to the optimization parameters.)
It is useful to use some probability distribution as \(f(x)\), as this allows one to translate non-negativity and norm of \(\rho(\omega)\) to non-negativity and norm of \(a_i\). Since one can only observe “broadened” spectra in experiment for any given temperature, a natural choice is the Lorentz (Cauchy) distribution:
where \(0\le \eta < \pi T\) is the “sharpness” parameter. The limit \(\eta\to 0\) corresponds to a “hard” discretization using a set of delta peaks, which should be avoided.
import scipy.stats as sp_stats
f = sp_stats.cauchy(scale=0.1 * np.pi / beta).pdf
pl.plot(w_plot, f(w_plot))
pl.title("Cauchy distribution");
Using this discretization, we finally arrive at a form of the analytic continuation problem suitable for a optimizer:
where
w = np.linspace(-wmax, wmax, 21)
K = -basis.s[:, None] * np.array(
[basis.v.overlap(lambda w: f(w - wi)) for wi in w]).T
Next, we will examine different regularization techniques that build on the concepts in this section…